6.824 2018 Lecture 4 Primary-Backup Replication
Readings - Practical System for Fault-Tolerant Virtual Machines Fault-Tolerant Virtual Machines论文
这篇论文讨论的主从复制与常见的相比,非常极端和雄心勃勃,论文基于vm构建了一个os级别的主从复制系统,较为细致的讨论了主从复制的设计和实现。
介绍
主从复制是实现server容错的常用方法,如果primary挂了,backup可以继续提供服务。将primary的全量数据同步到backup是比较耗费带宽的操作。更好的方法是将server视为确定状态机,基本思路是把primary和backup置为相同的初始状态,并保证二者都能以相同的顺序收到相同的输入。由于存在某些操作是非确定的(如:中断和获得当前时间),因此还需要额外的协同。
FT协议
Deterministic Replay
为了实现在backup进行replay,需要保证: 1. 正确的捕获所有输入和非确定的操作,以保证backup的确定性执行。 2. 在backup上正确的replay。 3. 对性能没有影响。
论文中关于非确定的操作,零零散散在不少地方提到,不过总结下来其实就是,这个操作不是pure function,结果受除输入的外部状态影响。更具体的就是,非确定操作使用到的资源是与其他(来自vm或hypervisor)的进程共享的,竞争导致了非确定的结果。
在多核系统上,上述的竞争会更复杂,这也是为什么论文没有在多核系统上实现的原因。
FT协议
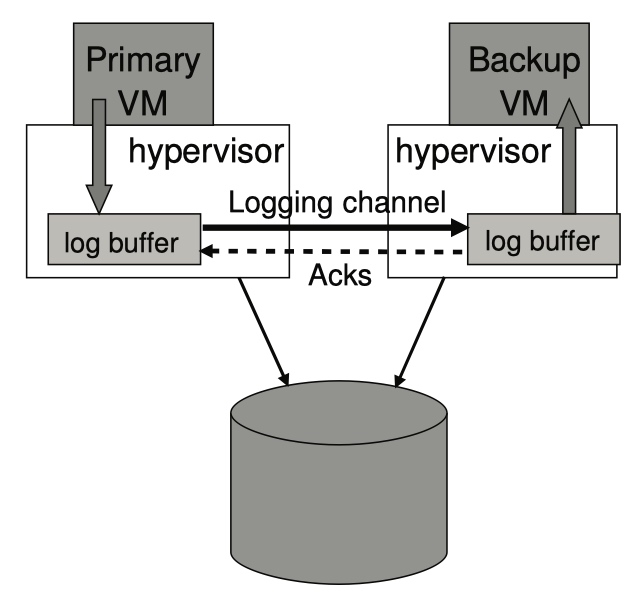
primary的日志实时的通过logging channel发送到backup。为了保证在切换的时候,backup能够以与primary相同状态进行服务,需要满足:
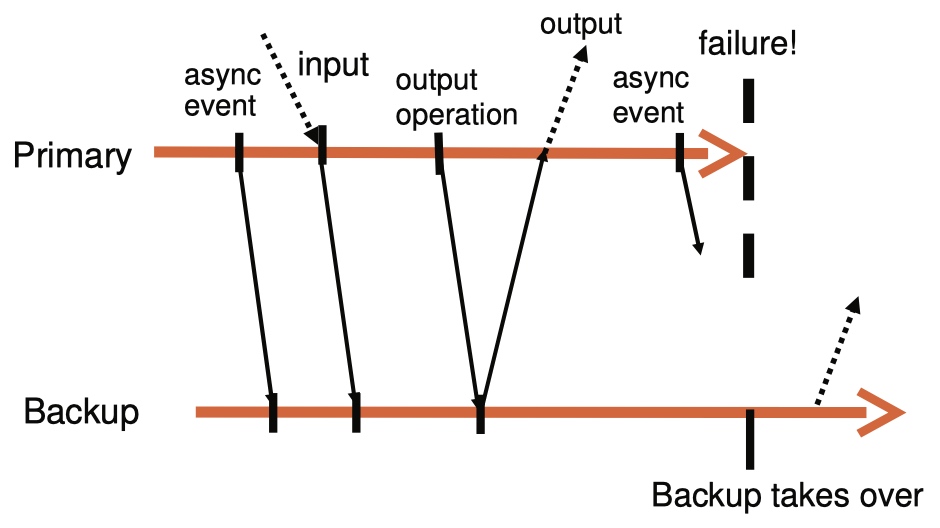
Output Requirement:如果primary失败,backup接替了primary,backup的执行需要保证所有的输出都与primary的一致。
只要满足Output Requirement,在发生主从切换的时候,client就感知不到打断和不一致。为了保证Output Requirement,需要backup在收到能够产生那个output的input之前,primary推迟输出,也就是下面的规则:
Output Rule:只有当backup收到能够产生一个output的log,并返回ack(表示已经存入log buffer)给primary,primary才能输出。
除了VM-FT有,在其他的多副本系统上都以某种形式出现着。
primary等待ack不必阻塞系统当前的执行。
检测和响应失败
检测失败: * server之间的heartbeat * logging channel的traffic是否一直存在
如何避免split-brain: * 共享磁盘存储,原子的检测标志位
实现
FT VM启动
- 使用基于VMware VMotion实现的FT VMotion完成clone,primary的中断小于1s。
- 使用VMware vShpere实现的集群服务来选择最佳server创建backup。
logging channel管理
log buffer的局限: primary(或backup)的log buffer满了(或空了),primary(或backup)需要等待至log buffer可用为止,此时会暂停对client的服务。
主从切换的时间=检测primary失败的时间+backup消费log buffer的时间,为了减少切换的时间,在backup无法及时消费log的时候,会减慢primary的速度(限制CPU)。
FT VM上的操作
除VMotion外的所有运维操作(例如:调整cpu限制),都必须在primary上完成,然后通过特殊的日志项目发送到backup。
关于磁盘io的实现问题
- 磁盘访问时的竞争会导致非确定的操作。
- 检测这样的io竞争,并在primary和backup上以相同顺序执行。
- 使用DMA时,对磁盘和内存的访问会导致非确定的操作。
- 对磁盘的读写,改为读写bounce buffer。
- 只有当数据全部读到buffer以后,FT才会从读指令处恢复primary/backup的执行,避免二者出现差异(如果直接依赖DMA读取,primary和backup可能会在不可预知的时间点发生缺页中断,从而导致不一致)。
- primary在磁盘io完成前就挂了。
- backup切换为primary以后,无从得知io是否已经完成。FT会在backup上重试(前两点已经消除了导致非确定结果的操作)未完成的io操作。
- 那么如何判断未完成的io操作是哪些?io完成以后,设备会产生一个中断,如果某个io log缺少相应的中断,那么就需要重试。
- primary在磁盘io完成后挂了
- backup同样无从得知io是否已经完成。此时重新执行写磁盘是幂等的(而对于网络io,tcp会忽略重复的包)。
关于网络io的实现问题
hypervisor对vm buffer的更新导致了非确定操作,改为由vm触发hypervisor的中断,并记录到log。
其他设计
非共享磁盘
优势: * 磁盘作为vm的内部状态,primary写磁盘时不必等待backup的ack。
缺点: * backup失败、执行FT VMotion时,需要同步磁盘数据。 * 需要使用其他方法来解决split-brain,例如:另外一个server作为共享存储;多个机器进行投票选主。
backup上执行read
在从执行read,论文考虑的点并不是可以增加系统的read上限,而是考虑不发送read log可以减少logging channel的带宽。
具体看在backup上执行read,需要注意的点是: * 如果primary成功,backup失败,backup需要重试,直到成功。 * 如果primary失败,那么尝试读取的内存必须发送到backup。 * 如果primary执行了读,然后是写,那么在backup也必须按照这个顺序来执行。
Lecture
Fault tolerance
理想的特性 * 可用性 * 强一致性 * 对client和server software透明 * 高效
容错,容什么错? * Fail-stop failures * Independent failures * Network drops some/all packets * Network partition
不包括: * Incorrect execution * Correlated failures * Configuration errors * Malice
Fault tolerant MapReduce master
lab 1中的woker由于是无状态的,且mapper和reducer执行的都是pure function,因此实现容错很简单。
master实现容错,需要考虑: * 需要复制什么状态?应用程序级?指令级?(woker list、完成的job、空闲的worker、tcp连接状态、程序memory和stack、cpu寄存器?) * primary是否需要等待backup? * 什么时候切换到backup? * 切换时是否能被观察到? * 如何快速的切换?
主要方法有 1. State transfer,简单,但是state可能会很大,传输很慢 * 主副本执行服务 * primary把新状态发送到backup 2. Replicated state machine,高效但复杂 * 所有副本执行所有的操作 * 如果所有副本有相同的起始状态、相同的操作、相同的顺序、deterministic,那么就会有相同的最终状态 * 例如:VM-FT,GFS
VM-FT
VM-FT是一个replicated state machine。
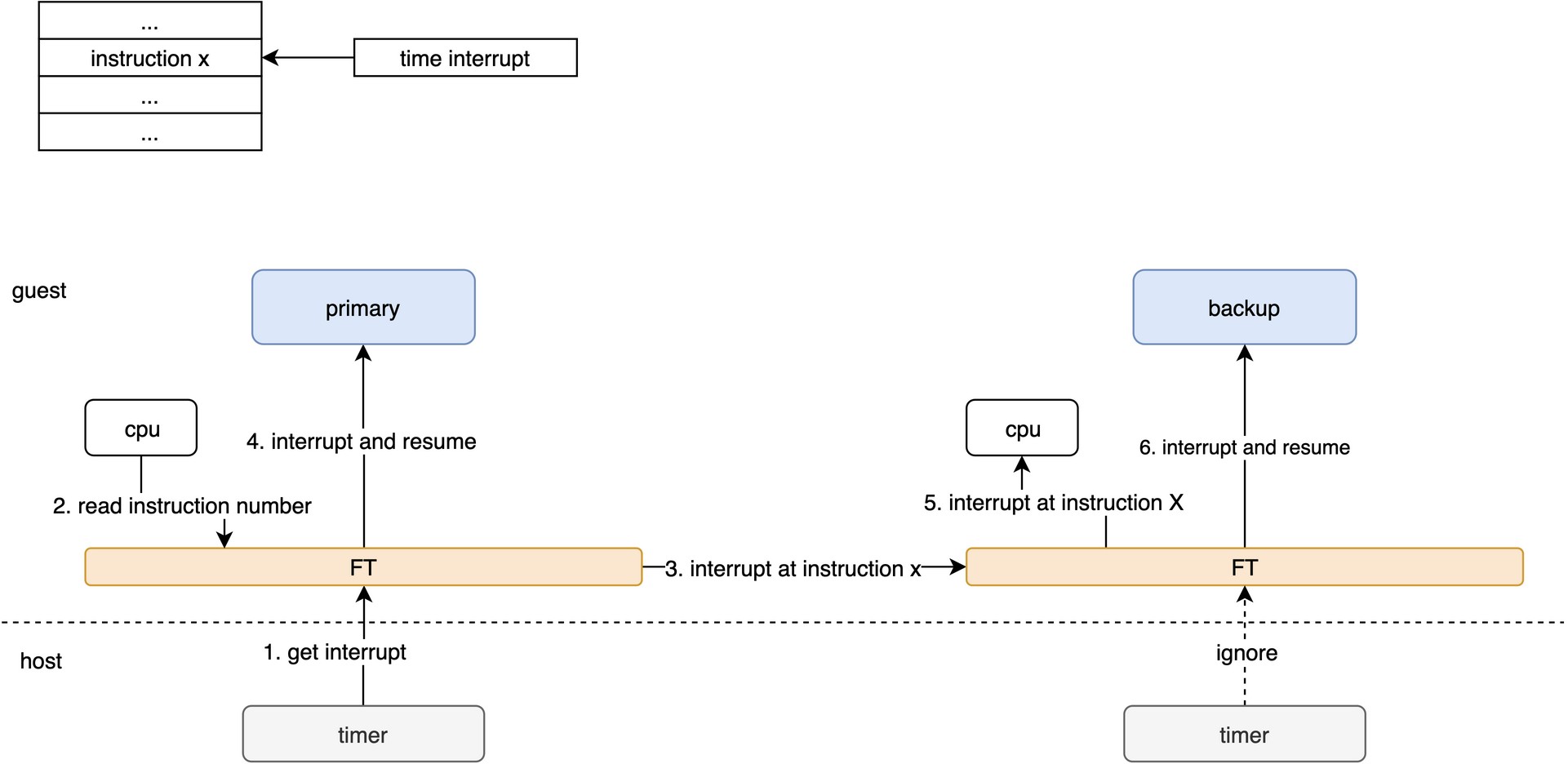
为了避免primary和backup出现差异,backup必须在指令流的相同位置、以相同的顺序看到相同事件。对于普通的指令,这个是比较容易实现的。FT对中断和磁盘/网络io会做特殊的处理。
例如:时钟中断
FT的有缺点
适用场景 1. 重要且低延迟的服务,例如:name server。 2. 不便于修改的服务。
不适用的情况 1. 高吞吐量的服务 * state仅仅是应用程序级别的,降低了开销,实现更高的性能。 * 例如:GFS适用应用程序级别的state。